
Braço robotizado
Descrição
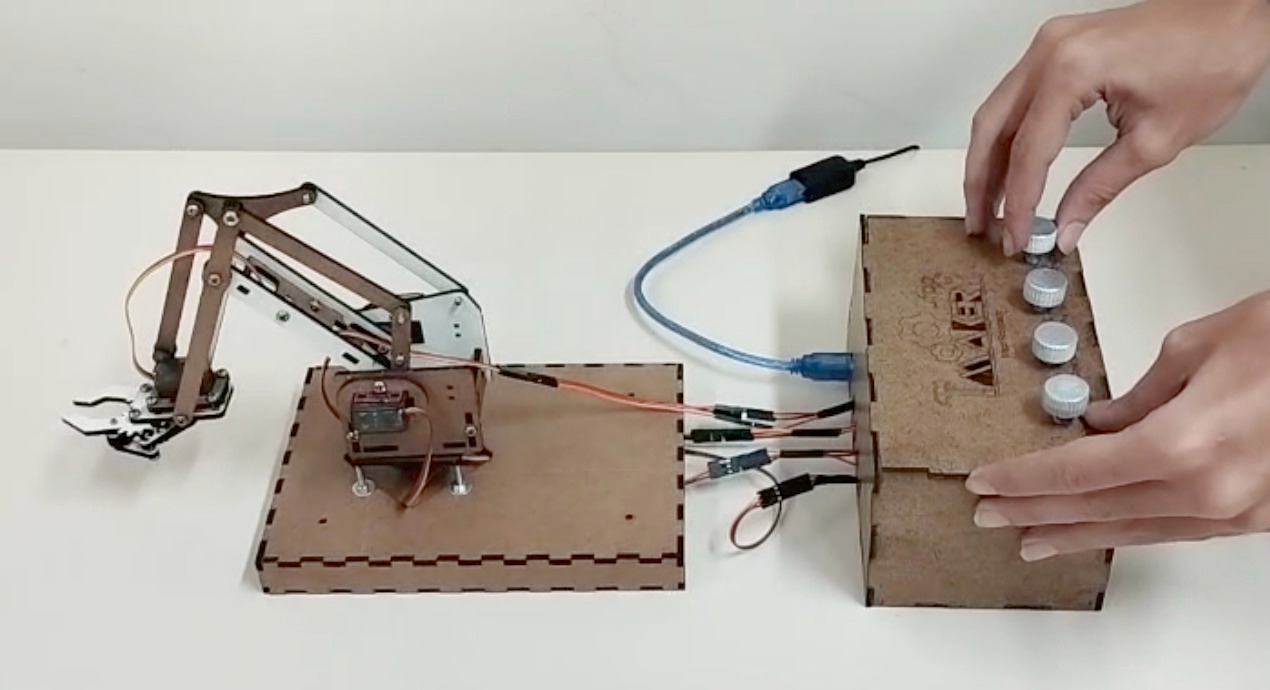
Braço robótico articulado com quatro graus de liberdade, permitindo a execução de movimentos angulares e manipulação de carga em pequena escala. Estrutura principal fabricada em placas de MDF, preparadas por meio de uma cortadora/gravadora a laser, garantindo o ajuste das juntas e a integridade mecânica das articulações. Este item realizado como uma ferramenta de Robótica Educacional para auxiliar no Ensino de Física, permitindo a aplicação de conceitos que por vezes parecem muito abstratos em aulas tradicionais.
Conteúdos Abordados
- Mecânica e Máquinas Simples: Abordagem prática sobre o funcionamento de alavancas e engrenagens aplicadas a sistemas articulados.
- Eletrônica Aplicada: Integração de servomotores, potenciômetros e microcontroladores para o controle de atuadores.
- Programação e Lógica: Compreensão de códigos no ambiente de desenvolvimento integrado (em inglês: "integrated development environment" - IDE) Arduino e uso de bibliotecas de controle de "modulação por largura de pulso" (em inglês: "pulse width modulation" - PWM), para garantir movimentos suaves e precisos.
- Simulação e Prototipagem: Uso do software Tinkercad® para testes prévios de modelos virtuais, reduzindo erros na montagem física.
- Interdisciplinaridade: Articulação entre conceitos de Física, Computação e Engenharia, de forma investigativa, para a realização de experimentos e protótipos.
Material Utilizado
- Estrutura Física: Peças em MDF cortadas a laser (baseadas no modelo disponível no Thingverse®) e base rígida para estabilidade.
- Microcontrolador: Uma Placa Arduino Uno®.
- Atuadores: Servomotores SG90 para a movimentação das articulações.
- Controle Manual: Potenciômetros para ajuste individual do ângulo de cada servo.
- Prototipagem Eletrônica: Protoboard e cabos jumpers para conexões.
- Software: IDE Arduino® para programação e Tinkercad® para simulação.
Este braço robótico foi baseado em um modelo disponível no Thingverse®, com arquivos disponíveis também no repositório GitHub®, no Autodesk Instructables®, e guia de montagem disponível na plataforma Ateneu®. Complementado com peças geradas com uma impressora 3D Creality Ender 3 V2 Neo (botões de controle dos potenciômetros) e uma gravadora CNC de corte a laser Sculpfun S30 Pro.
Links Relacionados
Artigos em português:
Artigos em outros idiomas:
- MeArm V0.4 - Pocket Sized Robot Arm. Thingverse
- MeArm / MeArm. GitHub
- meArm v0.4 Assembly Manual. Ateneu - Materials i recursos per a la formació. Generalitat de Catalunya
- Pocket Sized Robot Arm MeArm V0.4. Autodesk Instructables
- KIT - 1149 Brazo Robótico. Robodacta STEAM
- KIT 1148, KIT 1149. Manual de usuario. Robodacta.mx Robótica didática
- Design of an affordable IoT open-source robot arm for online teaching of robotics courses during the pandemic contingency. Victor Hugo Benitez, Robert Symonds e Diego Elguezabal. HardwareX, v. 8, e00158 (2020)
Vídeos em Português:
- Experimentando: Braço robotizado / Robotic arm - Laboratório de Demonstrações - UFPA (YouTube)
- Experimentando: Braço robotizado II / Robotic arm II - Laboratório de Demonstrações - UFPA (YouTube)
Vídeos em outros idiomas
Redes Sociais